

1、引言
各种原理构成的液位测量方法很多,如钢带浮子式、磁浮子式、静压式、电容式、伺服式、超声波式、雷达式液位测量等。对于一般情况的液位测量都能满足要求。但是,对于大量程、多参数、高精度的液位测量,以上方法都存在不理想之处。例如,对于较大直径及高度的储油罐,油位和水位的高精度测量决定着油料容积和质量的精确测量以及油料输送系统的高精度控制。几毫米的测量误差,将会带来巨大的经济损失。像这样的储油罐,有的高达20多米,对于这么大量程的液位测量,若能达到在不同环境条件下,测量误差只有几毫米是非常不容易的。即使采用精度为0.1%的液位测量仪表,还存在20mm的误差。
随着新型功能材料的开发以及电子技术的发展,美国MTS系统公司和VeederRoot公司研制出了磁致伸缩液位传感器。它具有重复精度高(可达0.01%F.S.),不用定期标定及维修,安装容易,可同时测量液位、界位及平均温度等独特优点。
2、工作原理
磁致伸缩效应是铁磁材料在磁场中会发生形变的物理现象,即在外磁场作用下,材料内部随机取向的磁畴发生旋转至与外磁场方向一致,使之在几何尺寸上出现沿外磁场方向的伸长或缩短现象。磁致伸缩效应在长度、位移测量等方面得到了广泛的应用,在液位测量中的应用只有十几年的历史,而中国目前还处在引进国外产品的应用研究与开发阶段。
磁致伸缩液位传感器是基于磁致伸缩效应、浮力原理、电磁感应、电子技术等综合技术所研制的高精度液位测量仪表。该仪表由波导管、外管、磁性浮子和电子部件组成,其工作原理如图1所示。
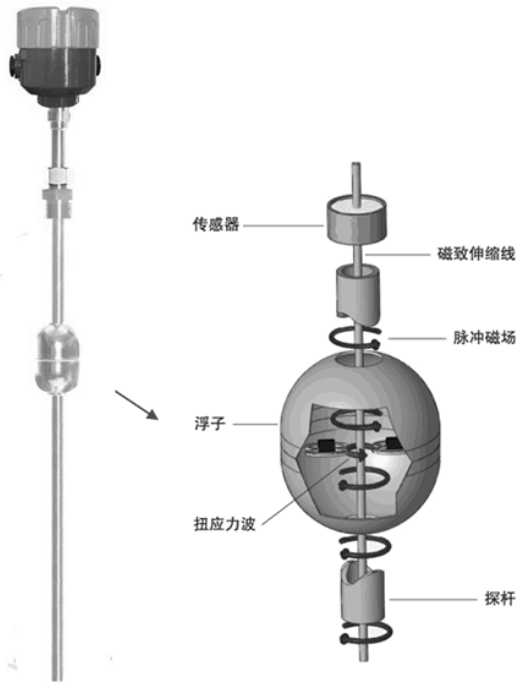
测量时,电子部件向波导管内的铜线发出一询问脉冲,此脉冲电流同时产生一垂直于铜线的环行磁场;沿外管随液位升降的浮子内置一组永久磁铁,产生一轴向磁场。当两磁场相交时,产生一螺旋磁场使波导管应变,并以超声波速运行到电子部件的感应线圈。测量从发射电流脉冲的时刻到返回应变脉冲的时间t乘以应变波运行的速度v,就可得到被测液位L。
L=tw(1)
该传感器采用磁致伸缩原理,将浮子式位移量检测的接触法测量变为磁浮子式时间量检测的非接触法测量,从而获得高精度。并且由于电子部件可探测由同一询问脉冲所产生的连续返回脉冲,所以可以在同一传感器上配多个活动磁浮子,同时进行液位、界位多参数测量。
3、实现高精度测量的分析与研究
磁致伸缩液位传感器是利用波导管产生应变,测量应变波的返回时间来确定磁浮子的位置。从而可知,要保证高精度的测量,必须具有检测时间量的高分辨率,同时还应考虑应变波速变化以及液体密度变化对测量的影响。因此,实现高精度,必须解决以下几方面问题。
3.1高分辨率的时间量检测(接口)
被测液位L是通过仪表对时间量t的测量来确定的。假定应变波的运行速度v恒定,由L=w可知,液位测量的高精度主要取决于对时间量的精确计量。为此,数字接口应是最佳选择,由高时钟频率得到时间计量的高分辨率从而实现液位测量的高精度。
接口部件给液位测量带来的误差为时间分辨率与速度v的乘积:
测量误差=时间分辨率·v(2)
要求:时间分辨率≤仪表允许误差/v
假如数字接口误差限定在0.1mm,波导管应变波运行速度为3000m/s,则要求时间分辨率小于0.03μs,时钟频率=1/时间分辨率,对于0.1mm的误差,要有33MHz的时钟频率来保证。
所以,要保证液位测量的高精度,首先要考虑选择时间接口的高时钟频率来得到对时间量检测的高分辨率。另外,为提高抗干扰能力,采用重复测量多次取平均值进行数字滤波,同时也使测量精度得到相应提高。
如上分析,要进一步提高分辨率,则要求更高的时钟频率,同时计数器的电路功能也需要同步提升。MTS公司新产品中的电子板采用了该公司开发的专利ASIS电路,这个电路工作时犹如内置了360MHz的时钟,可以达到0.003μs的时间分辨率。
3.2对介质密度的变化进行温度补偿
实现高精度测量,除了从理论上要对直接测量量T进行高分辨力检测之外,介质密度随温度变化也是影响仪表精度的一个很重要的因素。介质密度随温度变化导致磁浮子浸入液体的深度发生变化将直接影响测量精度。特别是对于露天储油罐的液位测量,冬天、夏天温度变化几十摄氏度,对测量带来的影响不可忽视,必须采取措施。以典型的柱状浮子为例,分析介质密度变化对测量的影响。
设浮子浸入介质的深度为h,浮子排开介质的体积为V,介质的密度为pi,浮子的体积和密度各为V₂和pz。可以忽略浮子密度和体积的变化。利用阿基米德浮力定律,得:
P₁gV₁=P₂gV₂
V₁/V₂=p₂/p₁
△V₁/V₂=p₂/p₁(-△p₁/p₁)
△V₁/V₁=-△p₁/P₁
V₁=hπ(R²-r²)
△V₁=π(R²-r²)△h
△h=h(-△p₁)/p₁ (3)
式中:-表示浮子浸入介质深度随密度的增加而减小。
以油料为例,可以导出温度对液位测量的直接影响。油料的d定义为t℃的油料与4℃同体积蒸馏水之比,20℃油料的称为标准。油料在温度t时的与标准的关系为
dt₄=d204-a(t-20)
代入式(3)得:
△h=-ah(t-20)/d204(4)
式中:a为油料的温度修正系数,不同标准的油料的温度修正系数是不同的。
由式(4)可以看出,减小介质密度随温度变化对测量的影响可从两方面考虑。一方面,从浮子材质及结构尺寸考虑,尽量减小浮子密度,使浮子浸入介质的深度h减小。若不是柱状浮子(如球状),减小其外径R,也可减小密度变化对测量的影响。另一方面,应考虑温度影响的补偿。目前美国产品是沿波导管均匀放置几个温度传感器RTD,检测介质的平均温度,由信号转换部分进行修正。此外,根据温度修正系数还可以计算出容量,通过监测容量的改变还可以得到其泄漏速率。
3.3对应变波速的变化进行校正
机械波在波导管上的传播速度受温度影响是很微小的,在常温-10~45℃时,弹性波在固体中的传播速度基本为定值。但对高精度液位测量来说,其影响也应该引起重视。若进行高精度测量,可在波导管底部安装固定磁铁,使波导管在此处也发生磁致伸缩。此处离电子部件的距离L底是固定的,可以作为校正依据。
L/L底=T/T底
L=L底·T/T底(5)
由式(5)可看出安置固定校正磁铁消除了温度对应变波传播速度的影响。但是对于较高的油罐,内有水、油、气使之具有温度梯度的情况,只是一种平均温度的校正,不能完全校正。
4、结束语
通过对磁致伸缩液位传感器实现高精度测量的分析和研究,说明了该传感器之所以高精度,除具有高精度的测量原理与方法外,还必须配有高分辨率的信号检测接口以及温度补偿措施才能得以实现。
磁致伸缩液位传感器的高精度、多参数及自校正、免维护等独特功能,使它在目前液位测量领域占有绝对优势,相信很快它将在高精度、多参数液位测量中得到广泛应用。
 微信扫一扫
微信扫一扫
