

0、前言
1842年Joule发现了磁致伸缩原理,1960年Tellerman申请了磁致伸缩位移传感器的专利。由于磁致伸缩位移传感器具有准确度高、稳定性好、长距离测量等特点,可在冶金、化工、环保等许多行业广泛应用。TemposonicsⅢ系列磁致伸缩位移传感器具有高准确度和小的更新时间,在高准确度、高响应系统中的应用具有广阔的市场。
在液压控制系统的动态测试系统的研制中成功地应用TemposonicsⅢ系列磁致伸缩位移传感器,使动态测试系统近距离测试时,分辨力为2μm,在100m左右测试时,分辨力为4μm。总结出Tem-posonicsⅢ系列磁致伸缩位移传感器的软件设计思路。
1、磁致伸缩位移传感器
磁致伸缩位移传感器是利用Fe或Ni在磁场作用下具有伸缩能力的特性而设计的线性位移传感器。它由活动磁环和具有磁致伸缩性的波导管组成,活动磁环与波导管之间没有直接接触,它利用活动磁环产生的磁场与波导管内固定频率的电流产生的磁场相交,产生应变脉冲,该脉冲以固定速度运行到电子部件的测量头,从电流脉冲的上升沿到感应脉冲的上升沿之间的时间乘以这个固定速度,就是该活动磁环的准确位置。其结构如下图所示。
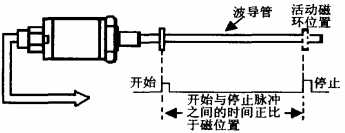
由于磁致伸缩位移传感器的磁致伸缩波导管与活动磁环不直接接触,因此它在恶劣的工业环境下(如油渍、溶液、尘埃等)也能正常工作,即使在高温、高压和高振荡环境下也一样工作自如。它的输出为绝对值,断电后重新上电无需进行其它处理,它的准确度高,安装方便。
Temposonics Ⅲ系列磁致伸缩位移传感器是“智能型”位移传感器,它具有高速度、高可靠性和高精确的数据处理和通信能力,内置电路板中含有微处理器,并采用专利ASIC电路提高分辨力和更新时间,输出读数标准为5μm,最高可达2μm,准确度及功能已接近光学尺,而其承受强力冲击、振荡及污染则比光学尺强。信号可以以位移和速度输出,并提供多种的数据传输方式,常用的数据信号传输模式有现场总线的CANbus,Devicenet,Profibus输出,SSI(serialsynchronousinterface)输出,模拟量的电压电流输出等。模拟量的电压电流输出模式的分辨力为16位D/A或0.025mm,而CANbus和SSI模式分辨力标准为5μm,最高可达2μm。SSI(同步串行接口)传输方式推出后,很快被市场接受。该传输方式的输出数字量是24位或25位的二进制数(或格雷码),它有仅4条通信线(2条数字传输线,2条时钟线)和2条电源线,最长的传输距离可达500m。
2、磁致伸缩位移传感器在液压动态测试系统中的
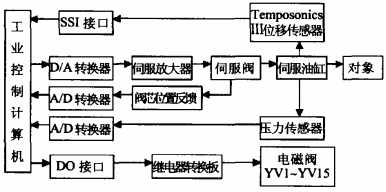
液压控制系统动态测试系统的方框图如下图所示。
本测试系统是在某公司硅钢厂ZR2和ZR1轧机AGC的改造中,由集美大学研制的液压控制系统的动态测试系统的基础上研制而成的,该系统已在某热轧AGC伺服缸修复的测试中推广使用。
本系统是一个高精度、高响应的控制测试系统,要求控制测试精度达到5μm。所选用的TemposonicsⅢ系列磁致伸缩位移传感器采用SSI数据输出方式,而SSI接口板则用ISA-Basic板卡,该板卡内有80C320微处理器,有2个通道的SSI接口,内置时钟28MHz,ISA-Basic板对1个循环的数据采集占用1kbyte的内存,除此之外,ISA-Basic板卡上还有隔离模入、模出通道各2个,有A/D8个通道。
在进行液压伺服缸最低启动压力测试时所用的传感器量程为0.16MPa,在系统工作状态时所用的传感器量程为25MPa。
3、软件设计
要正确地对SSI传输方式的TemposonicsⅢ位移传感器位移量进行采集,除了选择相应的SSI接口电路外,必须注意正确的方法。在系统设计和调试中总结如下:①首先对接口板进行初始化,设置有关参数;②根据要求设置并保存位移传感器零点;③编写输人程序,调整比例系数,计算出位移量。以液压控制系统的动态测试系统为例,接口板采用ISA-Basic板卡。
3.1接口板的初始化
正确进行位移量的数据采集必须首先进行接口板的初始化。在接口板的初始化程序设计中,为了提高分辨力,采用4次循环采集,系数M=4×28×9(4次循环采集,接口板内置时钟频率为28MHz,每英寸9ms),如为了提高采样速度采用1次采集,则系数M=28×9.但分辨力会低些。在实际应用中,可对系数M在小范围内进行调整。M系数的成功设置可使其通过给定输入函数得到与位移量相关的数据。
3.2传感器零点设置
TemposonicsⅢ传感器的零点可以根据需要在有效区内任意设定,零点的成功设置直接影响到该传感器的正确应用。对接口板初始化后,将传感器的活动磁环在零点的脉冲数(用Zero表示)作为参数保存起来,以备位移采集时使用。
3.3位移量的采集
在完成好上面两项工作的基础上,就可以进行位移量采集程序的设计。位移量的采集有两项关键技术①正负方向的判断和正负脉冲数的计算;②位移量的计算。位移量采集程序图如下图所示。首先读取浮点位移量(用时,表明此时位移量为负,则此时的负向脉冲数零位脉冲数Zero减去当前位置的脉冲数;当Position小于等于N时,表明此时位移量为正,则此时的正向脉冲数等于当前位置的脉冲数减去零位脉冲数Zero。所测得的位移量单位是mm。
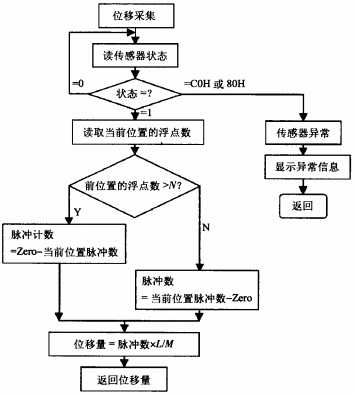
位移量=感应脉冲数×L/M,TemposonicsⅢ的分辨力与传感器的量程有关,在实际应用中总结出它的分辨力与传输线的长短也有关系,对于不同长短的传输线,L应作适当的调整。在液压控制的动态测试系统中,当传输线约7m时,L=2.分辨力为2μm;当传输线约100m时,L=4.分辨力为4μm。
4、使用效果
动态测试系统的时城测试效果如下图。
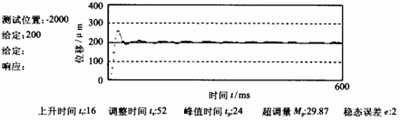
被测对象是一个结晶器振动系统的液压控制系统,所用传输线为7m。图中所有位移的单位是μm,从测试结果可以看出,稳态误差为2μm,也就是说分辨力可以是2μm。在某硅钢厂ZR2和ZR1轧机改造中,在现场离线测试时,传输线为100m,经参数调整后,分辨力为4μm。
5、结束语
在研制液压系统的动态测试系统中,通过反复的实践,对TemposonicsⅢ系列磁致伸缩位移传感器的应用有了较深理解,总结出该位移传感器的软件设计方法。实践证明这种方法是切实可行的。并在短距离位移测试中其分辨力可达2μm,在远距离位移测试中分辨力变大,必须进行有关参数的调整,传输线为100m时,分辨力为4μm。
 微信扫一扫
微信扫一扫
