

1、导论
当下新款液压支架所用的位移传感器是由磁致伸缩理论制造的非接触式绝对位置测量的位移传感器。它不仅能够适应于多种测量与检测之中,还可以结合着非接触式测量手段来减少因为长时间使用而导致传感器逐渐损坏的问题。除了传感器的性能较为优质和能够及时融入到所处环境之中较为可靠这几个特点外,也拥有着受电源电压变化的影响小,在-20℃到70℃范围内均能正常使用,以此能够为消费者创造出便利的条件,强于以往的干簧管式测控杆产品,能够满足使用者的实际需要。
2、位移传感器能够给液压支架带来的好处
液压支架属于综采设备中的关键部分之一,不仅可以对工作面的顶板起到一定的控制与支撑作用,还可以将采空区进行分隔,避免因矸石“跑”到回采工作面与输送机中而产生的问题。液压支架不仅能够和采煤机一起进行操作,还能够将机械化有效融入其中,改进在对煤开采时因为顶板的管理方式滞于工作的问题,继而加强在采煤和其运输过程中的效率,缓解劳动人民的辛苦程度,尽最大可能的使他们的生命财产安全得到保障。
液压支架不仅可以使电液的控制系统成为综采工作中自动化生产的主要方式,还能够使其在生产工作进行设备的自动控制,加强工作面生产的成效,促使外部环境可以得到有效改善,保障劳动者的安全。SAC系统主要由支架控制器、支架人机操作界面、隔离耦合器、压力传感器、行程传感器、隔爆电源、采煤机位置检测装置、井下主控计算机和电液控制主阀组等组成,推移(推溜)千斤顶安装于液压支架的底部,其内置安装一个位移传感器,检测推移千斤顶的活塞行程,进而掌握工作面的推进速度和累计推进量,以便准确制定工作计划和推算煤炭产量。
3、旧式位移传感器存在的缺陷
干簧管式位移传感器(测控杆),是目前在液压支架电液控制系统普遍采用的位移传感器。原理:
干簧管是磁敏的特殊类型开关,具有两到三个导磁导电特性材料制作出的簧片触口,被填制在拥有惰性气体的真空玻璃管中,并与罐内的平行封装簧片叠在一起,存有部分缝隙和接触后形成的开关闭合点。那么就会使永久性磁铁靠近干簧管时,簧片的接口会出现与极性相斥的磁极。因此当磁力超过簧片的抵抗力时,就会使相互分开的接口连接在一起。而磁力逐渐降低到一定的数值之后,接点又会在簧片抗力的不断作用下恢复到原始状态,以此完成这个开关动作。
把N个阻值相同的电阻串联起来,在两端加上一个固定的电压V,每个电阻上的电压为V/N,用N个干簧管即可分别提取每个分压电阻对地的电压值,因此可以得到一个连续量的电压信号输出。
存在缺点:
(1)该传感器的精度和精度直接取决于干簧管的排列间隙,一般大于4mm。
(2)由于一根测控杆就需要上百个干簧管,工艺控制难度较大,产品有不少无法避免的缺陷,如制造工艺复杂、精确度低、使用寿命不长等。
4、新型位移传感器的设计
新型位移传感器的设计主要来源于磁致伸缩的原理,在外形结构上完全与目前的干簧式测控杆兼容的,高精度低功耗位移传感器。
4.1磁致伸缩的拾能原理。这一产品大多是由波导丝、测杆、电子仓和套在测杆上的没有接触过的磁环(里面装着永久性的磁铁)来进行组合的。那么就会使得传感器在进行大量工作的时候,导致电子仓里面具有的电子电路会开始进行新一轮的脉冲。这次的脉冲会在磁致伸缩线(即波导丝)里面进行有效且高速地传输,并出现一部分沿着该位置向前游走的旋转型磁场,当它和磁环里面的永久磁场遇到并进行碰撞后,便会使磁致伸缩出现反应,导致波导丝不断地摇晃,继而出现类似于音速的应变机械型脉冲,当它又被放置在在电子仓中的拾能区域进行感知时,便可以逐渐变化为对应的电流脉冲,继而使操作者从电子电路角度将这两个脉冲间的时间间隔计算出来,有效测量出位移的位置。即使断电了,再通电后,测杆上永久磁环仍能提供绝对位置输出,而不需要重新校验和归零。非接触测量排除了磨损的因素,始终保持着最好的耐久性和输出重复性。
4.2电路设计
(1)微信号放大电路。由于线圈拾取的返回信号较弱,容易引入噪声或者干扰,因此要结合着由三运放形成的仪表器械来进行研究。例如下图:
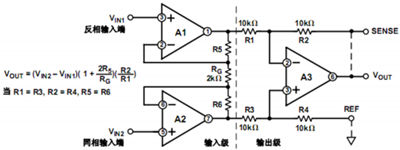
上图例示中的A1、A2都属于运算放大器下缓冲输入的电压模式。但在这一构造中,单纯的增益电阻器,即RG则需要接入缓冲器的求和位置中间。因为每一个放大器的求和点处的电压大多都类似于加在那些正输入端口之中的电压。所以每一种差分输入类型的电压都将彰显在RG这两个端口位置。并且当输入的电压被放大之后,它的差分电压会分别出现在R5、RG、R6这三个位置中,因此差分电压的增益效果便能够利用RG不断改进。通过这样的接分方式,可以使减法器的电路增益用比几率在与具体的电阻器进行匹配后,于增益变化后不会对其匹配要求进行设定。这样的话,若 R5等于 R6.R1等于 R3、R2等于 R4.那么 VOUT=(VIN2-VIN1)(1+2R5/RG)(R2/R1)
因为RG两个端口的电压值等于VIN,所以经过RG的电流则与VIN/RG相同,这就意味着在信号被输入之后,流经A1与A2的那部分便会得到放大后的增益。但需要操作者注意的是,在放大器输入端的共模电压内的RG两个端口中拥有着一样的位置,继而电流无法从RG上面流经。正是因为没有电流经过的缘故,所以A1和A2这两个放大器将以特殊单位的身份对跟随器起到工作时的增益效果。那么共模的信号将会用单位中的增益效果来对缓冲器进行输入,使得差分电压会根据〔1+(2RF/RG)〕这一系数逐渐加大。从理论角度来看,用户是完全能够从前端增益效果中获益的,但不会增加共模增益与失误差值,即差分信号将会以增益的比例不断提高,略强于共模误差,因此它具有的比率〔增益(差分输入电压)/(共模误差电压)〕会不断提升。
(2)应用单片机进行时间间隔测量的原理。磁致伸缩位移传感器的计算方式是较为简便的,它会把测量出的时间
差和磁致伸缩扭转波的传导速度相乘,继而得出位置等于扭转波传播速度乘以时差减去零点的位置,而零点位置在此过程中即为零区与死区相加的总和。因为磁致伸缩材料是由全圆形的截面丝所组成的,并依照着三维弹性相关理论,了解到扭转波在传播过程中是和圆截面杆中的圆柱中心所对称的,继而得出扭转波的速度为c1=(G/ρ)1/2.公式中的G有着磁致伸缩材料切变模量的含义,而Q则代表磁致伸缩材料中的密度。那么位移L=cl * T0- L0(其中:c1代表着应变波的传播快慢,T0则体现着时间间隔,L0为零点位置,零点位置等于零区与死区之和)。因此可以得知位移测量误差⊿L=⊿c1*T0+⊿T0*c1.而对于里面的波导管而言,只要处于一定的温度范畴中,都可以使G与P保持恒定,因此c1是恒定的,即⊿c1=0.那么位移测量的误差主要由时间量检测的误差决定,⊿L=⊿T0*c1.所以在对位置进行计算时,重要的环节之一便是对时差进行测算。
现如今,信息化和电子技术正在不断地发展,为精准测量提供出了许多性能高、体积小的器件,其中囊括着多种算法,因此操作者就可以结合着现代计算机技术,对声波脉冲的传导时间进行精准的测验。一般情况下,数字电路拥有着噪声低,精度高的特征,由外面连接的控制器触发出信号。传感器子接收电路利用触发脉冲和回波脉冲调制产生出一个较宽的脉冲,大约与磁铁的位置是正比关系。之后操作者要通过数字技术的手段来对其进行验量,体现出计数的价值,保证能够在脉冲触发时开始计量,以此在接收到回波信号时渐渐停止。当利用计算器进行数值计量时,便可以有效地将位移数据运算出来。两个窄脉冲信号分别为触发脉冲和回波脉冲。利用这两个窄脉冲信号调制出来的脉冲宽度分别为T2和T3.触发信号的时间T1已知。如果计数器的时钟频率为f,周期为T。若对于T2段,计数器的计数值为m2.对于T3段的计数值为m3.那么T0=(m2+m3)*T/2+T1/2;由于采用数字计数方式测量,计数误差是±1.时间误差是±T。由此可得,当时间的分辨力变高时,位移的测量误差就会越小,因此具有高分辨力的时间量的检测对传感器实现高精度的测量是非常关键的。因此操作者要提高对时间的分辨能力,那么加强计数器的时钟频率便是一个行之有效的方式,由⊿L=⊿T0*c1=c1/f,其中:f为计数器的计数频率。对于本传感器的材料,c1=2830m/s,如果系统要求位移最大误差为20um,则:f=2830*106/20=140MHz如果系统计数时钟频率为50MHz,则时间误差为±20ns,位移最大误差为56Lm。由此可见,如果达到系统高精度要求,这种简单的计数方式需要很高的时钟频率。
CPU系统采用美国MICROCHIP公司的高性能、低功耗的8位CMOSFLASH单片微控制器PIC18f2520.该单片机具有RISCCPU;上电复位电路(POR);上电延时定时器(PWRT)和震荡器起振定时器(OST);带片内RC振荡器的监视定时器(WDT)以保证可靠工作等性能特点。它内含一个4KX14位的程序存储器,MI2C总线,MSSP接口,AUSART通用同步/异步收发器,16位定时器,CCP/PWM等外围功能模块。
PIC18F2520的定时器/计数器1(T/C1)具有输入时的捕捉功能,当发生输入捕捉的事件之后(边沿性触发,这里主要是设置成下降沿),那么T/C1值就会被传输到输入捕捉寄存器中进行保存。输入捕捉的单元囊括着一个数字滤波的单元(噪声消除器)来减少噪声的干扰。
当反射脉冲经过模拟电压比较器输出电平发生变化(这里设置为上降沿,由高电平变为低电平)。另外,该电平的变化是被一些边沿检测装置所印证的,只要将其输入便会有效激发。
时间的测量计数源为4MHz时钟,因此时间传感器分辨率即为时钟周期,为250ns。
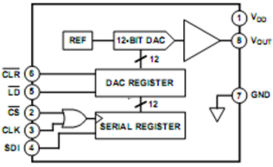
(3)进行DA有效转换。DAC8512拥有着系统的串行输入体系,也是一款由12位输出电压所组成的数模转换器,它按照+5V的单电源模式进行供电,拥有内置的DAC、基准电压源、轨到轨的输出放大器及输入移位寄存器等设施。而单芯片DAC则是由CBCMOS的工艺制作而出,比较适用于有着+5V电源插口的成熟设备之中,它拥有着成本较低,容易被应用的良好特征。
DAC8512的编码方法是应用二进制的标准原则,先让MSB进行加载,然后利用放大器在输出时的摆幅将其供应到每一节电路轨道之中,将其设置成0V到+4.095V的范围之中,结合着每位1mV的分辨率,提供出具有5毫安的吸电流和源电流。而通过激光进行调整的片内基准电压源也能够展现出4.095V的满量程输出型电压。
如下图所示,它三线式、高速的串行接口是和DSP相互兼容的,能够提供出相关时钟(CLK)、数据输入(SDI)、负载选通(LD)的引脚,以此接到不同的DAC上面。
5、结构设计
由于推移千斤顶油缸压力最高能达到60M,所以对位移传感器的耐压有很高的要求,设计要一下两个要点:
(1)测杆管壁计算,承压管壁厚将通过下面的公式进行计算:
Er=PD/2Kφσs
公式中的Er—钢管的壁厚(mm);(采用2.5mm)
公式中的P—设计出的最大能够承受的压力(MPa);公式中的D—钢管外部的直径(mm);(取17mm)
公式中的K—相当于设计方面的系数,大部分地域都是采用0.72这个数值;
公式中的φ—焊缝系数,取1.0;
公式中的σs—指的是材料中最低的屈服强度(MPa)。可以通过表格查询到,不锈钢304的σs=310
计算得
P=65Mpa>60Mpa
故符合要求。
(2)传感器与油缸之间要采用O形圈形态进行密封。当O型圈被塞入到已经封号的沟槽中后,它的截面会能够起到15~30%的压缩效果,将其形状进行细微地改变。并在介质的重压下,逐渐移到沟槽的另一边,以此起到良好的密封效果。O型圈的材料要选择丁晴橡胶,具有柔韧、耐磨、耐油、耐化学药品等性能,四氟乙烯挡圈,密封压力可达100Mpa。
6、结语
目前,自主开发的煤矿专用磁致伸缩测杆已经开始投向市场,以其高性价比、高稳定性、高可靠性的特点在液压支架的位移测量控制中发挥了重要作用,给客户创造了价值。
 微信扫一扫
微信扫一扫
